 平台热线
平台热线



哈尔滨工业大学提出一种利用外部交变磁场控制微型机器人集群的方法,能使微型机器人集群呈现出不同的形态,能在一定程度上模仿自然生命系统。
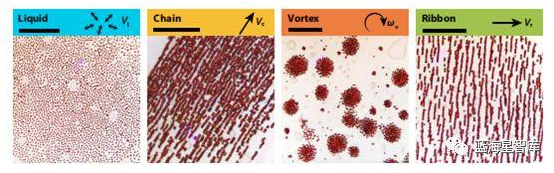
4种群集样式,从左到右依次为类似液体、链状、旋涡状和带状
研究人员利用交变磁场激发大量赤铁矿胶体颗粒构建微型机器人集群,其中胶体颗粒呈花生形,长轴3μm、短轴2μm。在外部不同磁场的驱动下,单个微型机器人呈现出振荡、滚动、翻滚和旋转的多种动态模式,进而形成类似液体、链状、旋涡状、带状4种集群样式。
研究人员使用离散粒子计算方法模拟了这种集群运动,并通过调整旋转磁场的频率及极化情况,快速转换集群样式。其中,链状群集可在狭窄环境中完成复杂运动;旋涡状群集可用于处理较大的负载;带状群集则能实现大面积的同步操作。
这种微型机器人集群可灵活重构,能满足不同的环境和任务要求,有望用于显像、靶向药输送等生物医学领域。
本文摘自: 网络
川崎机器人配件
