 平台热线
平台热线



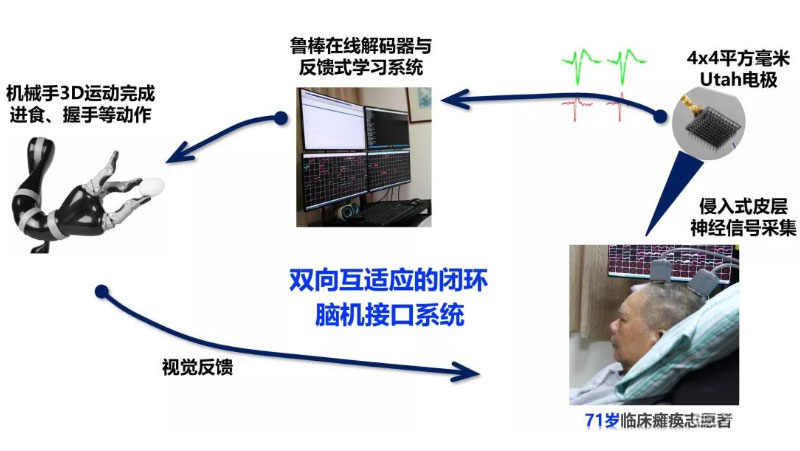
2020年1月份,浙江大学对外宣布了“双脑计划”科研成果,植入电极的志愿者可以利用大脑运动皮层信号精准控制外部机械臂与机械手实现三维空间的运动;同时证明高龄高位截瘫患者利用植入式脑机接口进行复杂有效的运动控制是可行的。
这次成果是我国首次实现了高位截瘫病人通过“脑机接口技术”控制机械臂,完成进食、饮水和握手等上肢运动。这标志着我国脑机接口技术在临床转化应用研究中已跻身国际前列。
据了解,该技术由浙江大学医培训附属第二医院张建民教授团队和浙江大学求是高等研究院郑筱祥教授、王跃明教授团队共同研究。
教育部“脑与脑机融合前沿科学中心”(双脑中心)副主任、浙大求是高等研究院王跃明教授说,把脑机接口技术在临床上转化,目前国际上的主要方向是将其用于渐冻症、高位截瘫等重度、不可逆性运动功能障碍患者的肢体运动功能重建,帮助他们“心(脑)想事成”。
该团队在高位截瘫患者脑内植入Utah阵列电极,然后用算法对电极收集到的脑神经信号进行分析,并输出机械臂可以理解的指令信号,*终实现患者的“意念操控”。
据相关资料显示,2012年,国外科学家首次通过植入式脑机接口,使瘫患病人可以操控机械手进行喝水、进食等动作。目前非入侵式脑机接口已经成为主要研究方向,外国创企NextMind今年推出的非入侵式脑机接口,已经让用户可以通过“意念”完成控制电视、玩游戏等活动。
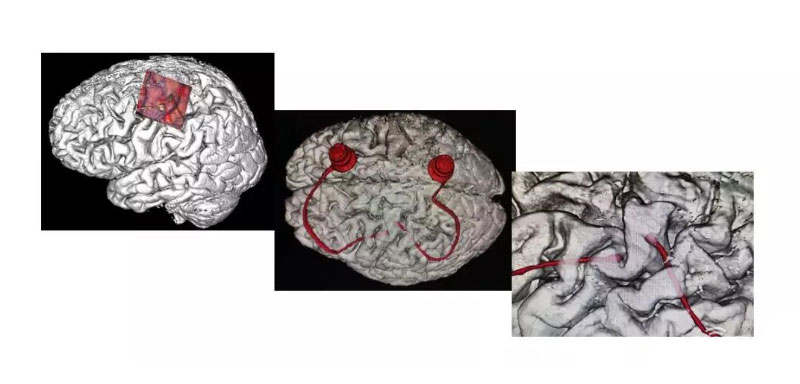
首先,用于脑机接口的电极必须要植入大脑运动皮层神经元中的第五层,丝毫偏差都会极大影响信号采集效果,并且损害其它神经。该团队利用步进为0.1毫米的手术机器人将两个微电极阵列送入既定位置,误差在0.5毫米以内。这也是全球首例成功利用手术机器人辅助方式完成的电极植入手术。
其次就是脑神经信号的采集和分析。目前国际上已报道的植入式脑机接口案例中,患者均为中青年人,此次项目中的患者为老年人,脑神经信号的稳定性也有所减弱。该团队引入非线性、神经网络算法,设计了一套专门针对高龄患者的方案,*终实现了较好的脑神经信号采集和分析效果。
浙大二院神经外科主任张建民教授介绍,患者的大脑皮层里植入了两个Utah微电极阵列,这是美国FDA**批准用于临床的脑电采集微电极。每个电极大小为4毫米见方,分布着100个电极针脚,每一个针脚都对应一个或多个神经元细胞。电极的另一头连接着计算机,可以实时记录大脑发出的神经信号。据了解,此次我国该脑机接口项目的成功主要由三个重要环节决定:微电极植入、神经信号采集分析和人机训练。
挑战从如何在尽量减少损伤的情况下将电极准确无误地植入患者大脑开始。大脑皮层神经元共分为6层,电极要植入到第5层。张建民说:“太浅了达不到效果,太深了又会损伤其他神经,难度非常大。”研究团队利用步径为0.1毫米的手术机器人,准确地将2个电极送入既定位置,误差控制在0.5毫米以内。
浙大较早就开展了脑机接口技术研究,依托神经科学、信息工程技术和医学等多学科交叉合作,其研究水平一直居于全国前列。浙大研究团队在国内率先实现了脑机接口技术在动物模型上的应用,包括猴子皮层脑电脑机接口控制外部机械手完成“勾、抓、捏、握”等不同手势,以及人脑意念操控大白鼠走迷宫等。
下一个关键问题是如何顺利实现“意念操控”。王跃明说:“机械臂抓取可乐瓶实际上是一连串信号流畅指挥的结果。患者年纪大了,注意力难以长时间集中,信号的稳定性比较差。”后来,研究团队引入非线性神经网络算法,自主研发了针对老龄患者的解决方案:采用循序渐进的训练方法,先让患者在电脑屏幕上操控鼠标来跟踪、点击运动中的球,再练习指挥机械臂完成上下左右等9个方向的动作,*后才是模拟握手、饮水、进食等动作。就这样一点点逼近“人与机械合一”的目标。
2014年,浙大研究者在国内首次实现人脑意念控制机械手完成“剪刀—石头—布”等较复杂手部动作。2016年,浙大脑机接口团队获得中国人工智能学会“吴文俊人工智能科学技术创新奖一等奖”。而此次在高龄患者脑内植入电极并实现意念操控机械臂实现三维空间运动,浙大团队又取得了一系列新突破。
2017年,中国科培训半导体研究所及合作研究团队提出任务相关成分分析算法,将稳态视觉诱发电位脑机接口的通讯速率进一步提升到5.4 bit/s,*优结果达到6.3 bit/s,是截至2019年8月为止,有报道的*快头皮脑电脑机接口系统。目前国内也已经广泛开展了非入侵式脑机接口的研究。
我国一直致力于脑机接口领域的相关研究,并且在国际范围内也取得了一定成果。清华大学早在2001年就实现了通过入侵式脑机接口控制鼠标、控制电视各个按键。2006年它们通过这种方式,控制两个机器狗进行了一场足球比赛。
据了解,目前全球脑中风,脑及脊髓损伤导致肢体运动瘫痪后遗症的病人接近1亿,仅中国就有两三千万。尽管目前入侵时脑机接口植入并非永久性的,但对于广大瘫患病人而言,脑机接口已经极大的改变了他们的生活,让他们看到了提高生活质量的希望。
脑机接口一直是全球科技界的重点研究领域,目前,非入侵式脑机接口研究逐渐成为各路科技巨头和创企的主攻方向,并且目前非入侵式脑机接口设备已经在CES 2020大会上展出。
王跃明表示,脑机接口技术发展前景十分广阔。比如,埃隆·马斯克已宣布旗下科技企业研发出新一代脑机接口信号采集系统,可将直径近4到6微米的超薄聚合物探针电极像“缝纫机打线”一样快速且微创地植入大脑皮层中,配合其自主研发的高集成芯片处理器,可以同步采集高达3072个电极的脑电信号。若能真正用于人脑,必将大大提高脑电信号采集质量和效率。此外,计算机科技的不断创新也将带来更多兼顾共性、突显个性的新算法,有助于进一步推进脑机交互的高度控制。
本文摘自:网络
想了解更多机器人请点击:川崎机器人
